
水下AUV虚拟仿真实验
实验网址:http://www.ilab-x.com/details/page?id=11364&isView=true
自主式水下机器人又称智能水下机器人(autonomous underwater vehicle,简称AUV)是一种自带能源、自主推进、自主控制,具有水下操控及感知作业能力的新型海洋监测设备,是先进制造技术、信息技术、声学及传感器技术相融合的高技术仪器,其观测范围大、效率高、成本低,运动可控、机动性能好、续航力强、效率高,可脱离母船自主作业,在海洋科学研究、海洋资源调查和海洋安全防卫等方面得到了广泛的应用,拥有广阔的应用前景,在一定程度上代表了水下机器人的发展趋势,许多国家已经把AUV的研发提上日程。
党的十九大报告提出加快建设海洋强国,国家对海洋开发战略的愈加重视。响应国家的号召,发展水下机器人、研究并开展相关水下机器人教学,为国家“走向深蓝”的海洋战略开创有利条件与核心竞争力。
但在AUV水下机器人的实验教学工作面临以下问题:
1、水下环境复杂,影响运动的因素较多,因此如何设计水下机器人是一个十分复杂的问题、成本高。
2、在海洋、湖泊水域开展水下机器人实验教学的不可控因素多,野外实验教学存在安全隐患。
3、水下环境复杂度高,水域面积要求大,建设水下实验室几乎不可行。
4、目前存在的水下机器人虚拟仿真软件多是工业演示用途,不适合实验教学。
这就意味着逼真有效的实验教学环境需求迫切,因此本项目引入仿真技术,依靠现代计算机网络技术及仿真技术建立AUV作业仿真模拟系统。
本项目团队成员由浙江大学机械工程学院深海机电装备研究Home团队的老师和机械工程国家级教学示范中心的实验老师组成,团队坚持以学生为中心的实验教学理念,遵照虚拟仿真实验项目“能实不虚,虚实结合”的原则,将Home团队的科研成果转化成水下AUV虚拟仿真实验平台,面向高校和社会免费开放。
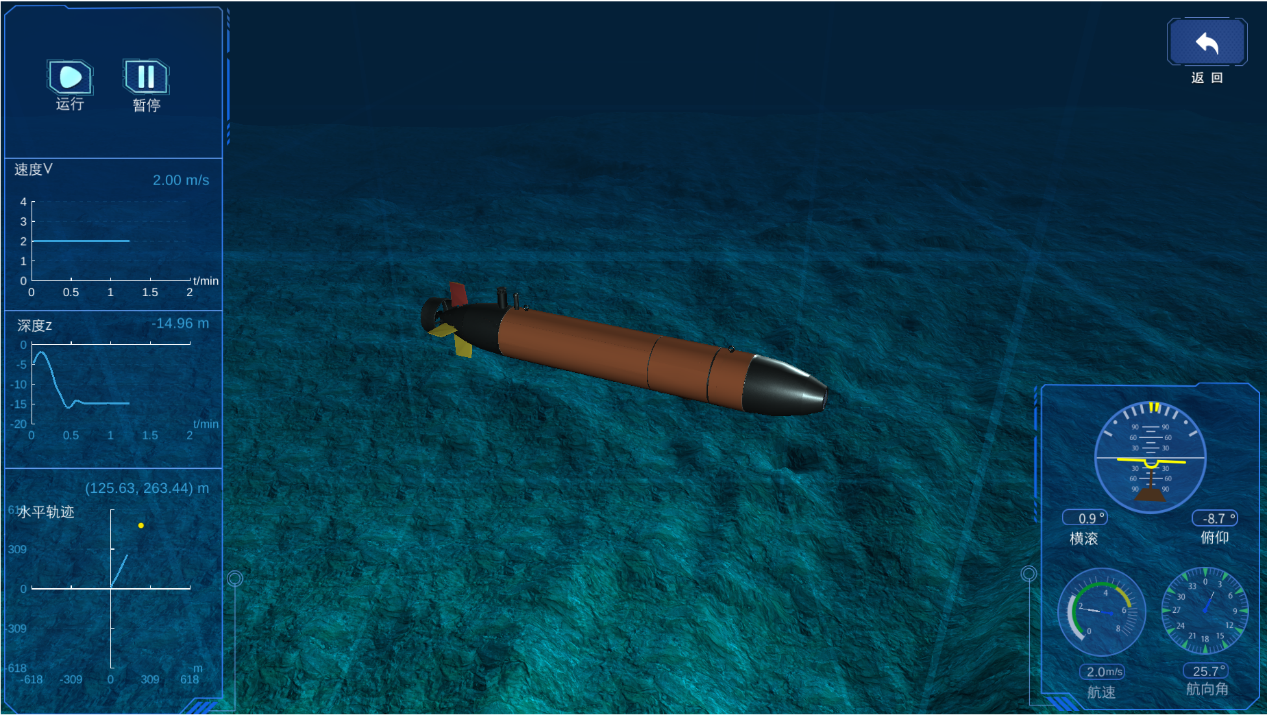
本虚拟仿真实验平台能真实模拟出AUV的结构特点,学生可以自行设计一个AUV来完成轨迹跟踪、定点巡航、水下接驳3个不同的实训任务,并通过三维立体方式实时反馈AUV水下航行时运动速度、位置和姿态等参数。通过本实验使学生较好掌握水下机器人的基本构造和工作原理,使学生所学的材料力学、机械设计、传感器、机电控制相关知识能得实际应用。
垂询电话:0571-88206259
邮编:310027 邮箱:meetc@zju.edu.cn
地址:杭州市余杭塘路866号浙江大学紫金港校区西四实验楼A座