
模块D:机器感知与控制实验
指导老师:王郑拓
项目介绍
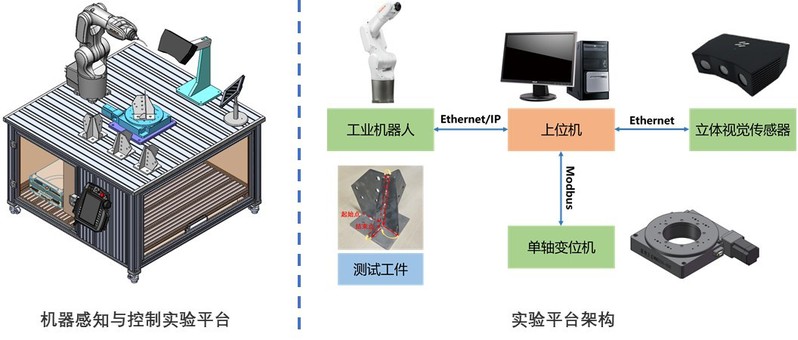
本课程基于工程思维导向,采用自主开发的机器感知与控制实验平台,开展机器人示教/离线/在线编程、基于三维视觉的工件加工信息提取、机器人运动学参数辨识、机器人工作站坐标系标定、机器人运动规划等机电系统相关领域的实验教学。本课程培养学生掌握智能制造的基本理论与概念,通过理论联系实际,学习工程思维思考,培养工程技术中的动手能力、科学思维方法、研究创新能力。
项目内容
1. 工业机器人的基本概念及示教编程
2. 机器视觉基本理论及方法
3. 物体齐次坐标变换的基本概念
4. 系统标定与定位精度补偿
5. 工件三维重建与加工特征提取
6. 机器人加工路径规划
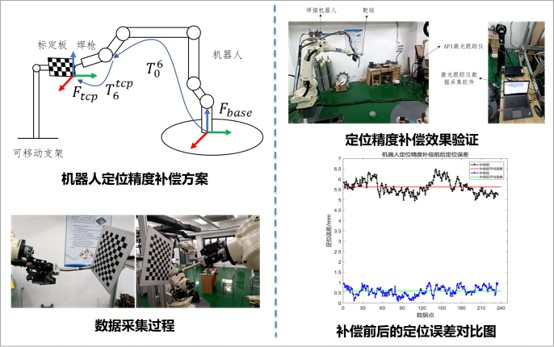
系统标定与定位精度补偿实验
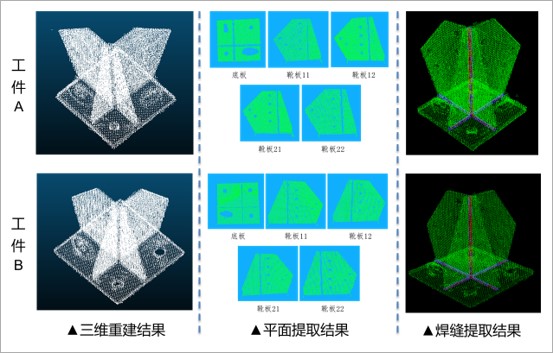
工件三维重建与加工特征提取实验

机器人加工路径规划实验
垂询电话:0571-88206259
邮编:310027 邮箱:meetc@zju.edu.cn
地址:杭州市余杭塘路866号浙江大学紫金港校区西四实验楼A座