报告人:Prof. Klaus Janschek
时 间:2018-03-21(周三)15:30 - 17:00
地 点:浙江大学玉泉校区教3-406室
报告主题:Relative Navigation for In-orbit Servicing of Non-cooperative Spacecraft
Abstract:
Robotic servicing is a key technology for enabling autonomous on-orbit servicing and the manipulation (e.g. repair) of spacecraft. Moreover, it can be used as an assistance system on manned space missions releasing astronauts from performing difficult and dangerous operations. An indispensable subtask of on-orbit servicing is the rendezvous (RV) navigation between an approaching spacecraft (called chaser) and a target object (e. g. spacecraft or space debris). Due to the risk of collision the requirements for accuracy and robustness are very high. For rendezvous with damaged satellites or space debris further challenging conditions must be considered: the target is supposed to be passive (maybe tumbling), it must be assumed in general being non-cooperative or unprepared and its 3D structure is maybe even unknown. Vision based perception systems with cameras (visual, infrared) and laser distance sensors (LIDAR) offer promising capabilities for recovering both the target’s relative pose (position and orientation) and its geometrical structure from image data. Due to unfavorable environmental conditions (illumination, reflections, and thermal variations) the processing of the image data and the estimation of pose and 3D structure put several algorithmic challenges for realistic missions.
The lecture introduces the key drivers for algorithms development and reports on recent and current research results on the pose and geometric structure estimation of our TU Dresden Automation Engineering Lab, e.g. an ongoing project with European Space Agency for servicing the ENVISAT satellite (see Figure 1).
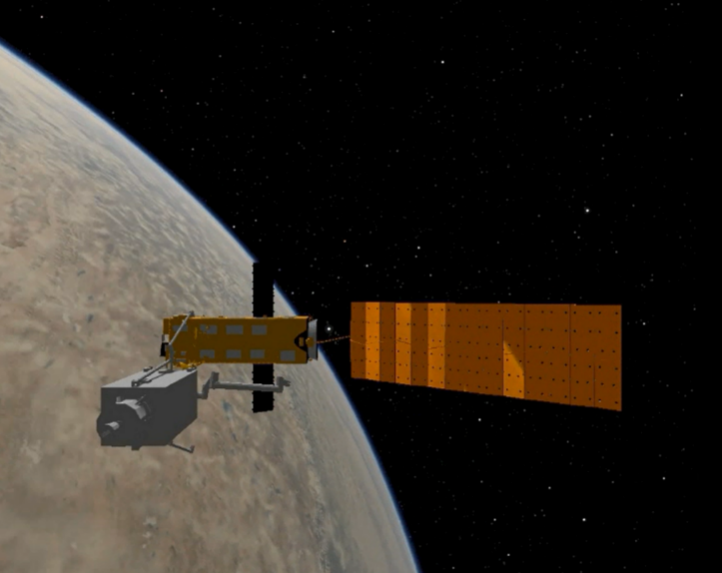
Figure 1: Proximity operation for servicing of ENVISAT satellite (synthetic image with ambient light)
Brief Biography:

Klaus Janschek received his Dipl.-Ing. degree in Electrical Engineering (1979) and PhD (Dr.techn.) in Control Systems Engineering (1982) from Technische Universität Graz, Austria; 1982 to 1995 industry affiliations in control systems development (fatigue and vehicle test systems, aerospace guidance, navigation and control); since 1995 to today full professor of Automation Engineering and Managing Director Institute of Automation at the Faculty of Electrical and Computer Engineering and affiliated faculty member to the Faculty of Mechanical Engineering, Technische Universität Dresden, Germany; 2001-2006 Dean of Studies Mechatronics Engineering and 2009 to 2012 Dean of Faculty Electrical and Computer Engineering, TU Dresden.
Visiting positions (scholar/professor): Stanford University, USA, Aeronautics & Astronautics Department (2005); Universidade Tecnológica Federal do Paraná, Campus Curitiba, Brasil (2007); Universidade Federal de Santa Catarina (UFSC), Florianópolis, Brazil (2009, 2012, 2014, 2016); Guest Professorship (2012-2015) and grant holder for 111-project 2017-2021 at East China University for Science and Technology (ECUST), Shanghai, China; Zhejiang University, Hangzhou, China (2017).
Scientific activities (selection): IFAC – International Federation of Automatic Control: Member of the Technical Board – Coordinating Committee Chair CC 4 “Mechatronics, Robotics & Components (2014-2017); Coordinating Chair of 21st IFAC World Congress 2020 in Berlin, Germany; Vice-Chair Technical Committee on Mechatronics (2009-2011, 2012-2014); Chair of Application Paper Prize Selection Committee (2012-2014); 4th IFAC Symposium on Mechatronic Systems 2006, Heidelberg, Germany: Chair of the International Program Committee. DFG – Deutsche Forschungsgemeinschaft (German Research Foundation): Elected Review Board Member (2008-2011, 2012-2015) for Automation, Control Systems, Robotics and Mechatronics; Head of Review Board on Systems Engineering (2012-2015). VDI – Verein Deutscher Ingenieure, Measurement and Automation Engineering Society (GMA): Elected Board Member, Branch Chair of Mechatronics, Robotics and Actuators; Chairman of the Technical Committee on Mechatronics (1999-2010) German Mechatronics Conferences: Program-Co-Chair (biannual, since 2005).
Research interests: guidance-navigation-control, data fusion, mobile robotics, optical data processing and optomechatronics, systems design.