课程名称:《移动机器人控制》 Mobile Robot Control – A Systems Approach
课程编号:2523079001
课程学分:2学分(24课时+8实验课时)
课程简介:
课程主要从系统角度了解移动机器人的基本功能(引导、导航、控制)及其在闭环系统中的分布和交互作用。主要内容包括: 移动机器人运动学(运动动态模型、运动动态约束、2维平面环境中轮式机器人)、移动机器人定位(坐标系和变换、航迹推算、距离方位计算、状态空间模型、卡尔曼滤波技术、传感器融合、同时定位和映射-SLAM、可观测性与一致性、滤波性能评估)、移动机器人测绘(术语和定义、地图类型、已知姿势和栅格地图的测绘)、移动机器人导航(一般概念、可控性、微分平滑性、避免碰撞、局部规划方法、全局规划-确定性方法、全局规划-随机方法)和移动机器人跟踪控制(一般控制结构、非线性跟踪控制器综合)。
课程通过移动机器人系统的建模、控制、仿真分析等基础理论和案例分析,培养学生对以移动机器人为代表的机电一体化系统的建模、数值仿真、控制设计的能力,为日后的科研或技术开发工作打下基础。
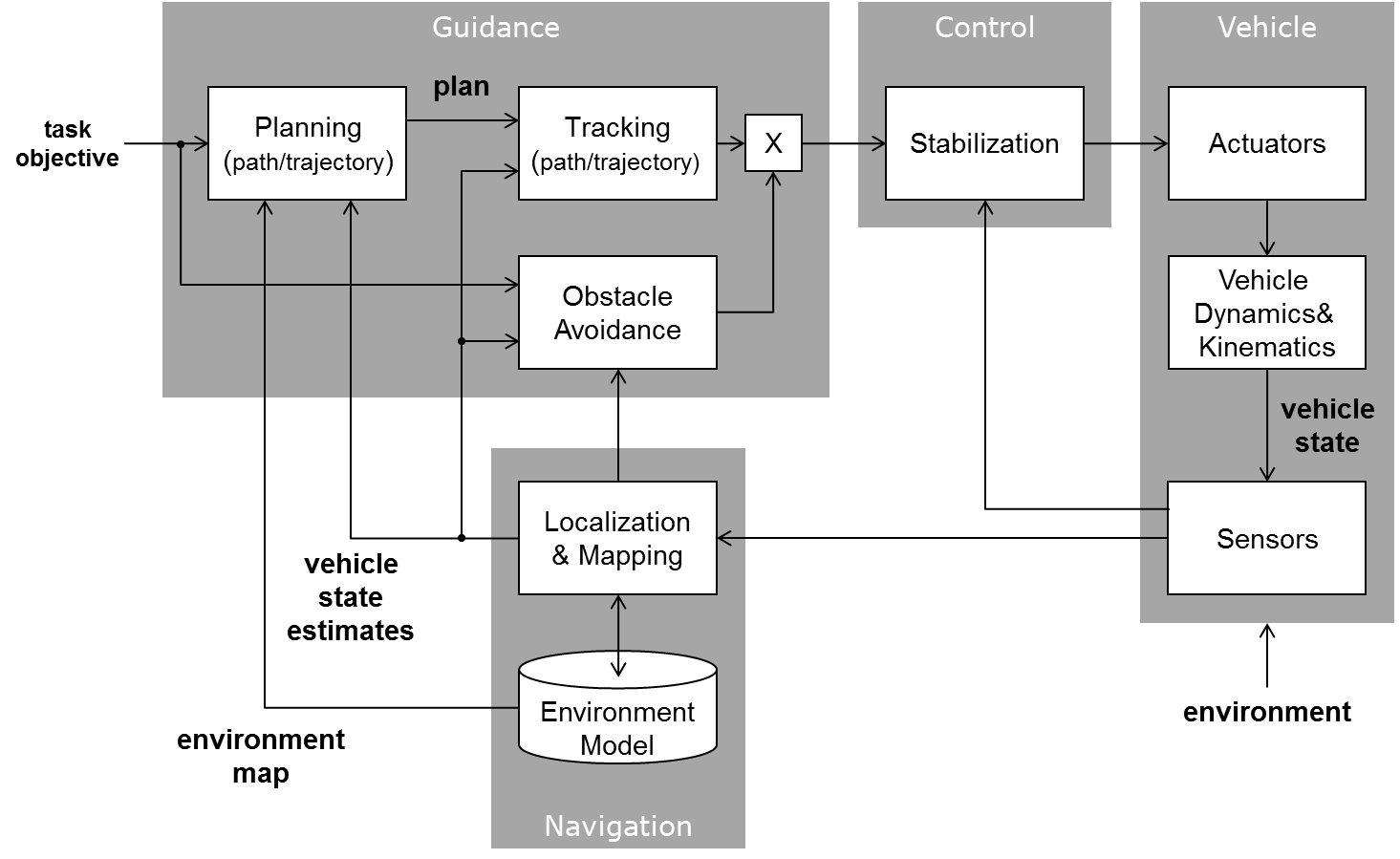
课程内容框图
授课对象:面向机械工程学院全体研究生
授课方式:线下授课
课程容量:50人
授课时间:9月17日至10月17日,具体安排见下表。
授课地点:紫金港校区教室,待定。
主讲人简介:Klaus Janschek教授是机电系统控制与自动化领域国际著名专家,在先进控制系统理论及其航天机电系统应用领域取得了突出成就。他1982年于奥地利格拉茨工业大学(TU Graz, Austria)获控制系统工学博士学位。1982-1995年在德国戴姆勒奔驰等公司从事控制系统研发和技术管理工作。1995年起任德国德累斯顿工业大学(TU Dresden)电气与计算机工程学院自动化工程讲席教授、自动化研究所所长以及机械工程学院联合教授,2009-2012年曾任该院院长。2005年在美国斯坦福大学做客座教授。他的研究专长包括视觉导航、数据融合、移动机器人、光学数据处理与光机电一体化、系统设计(系统辨识、性能评估、离散事件系统、机电系统)等。
现任国际自动控制联合会(IFAC)技术局成员,IFAC机械电子学、机器人及元部件协调委员会主席(CC 4 Chair),IFAC应用论文评奖委员会主席,美国航空航天学会(AIAA)委员,德国航空航天学会(DGLR)委员。1999-2009年任德国自动化期刊at-Automatisierungstechnik编委。他曾任德国测量与自动化工程学会(GMA)理事与顾问委员会委员,2003年当选工业合作研究协会(AiF)科学评审理事会理事,2008年当选德国科学研究基金会(DFG)自动化、控制系统及机器人专业科学顾问,2009年任德国科学与人文科学委员会电气工程学科评审专家。2009年获德国Oldenbourg出版社学术期刊atp奖,2004年获IFAC第3届机电系统国际会议最佳论文奖及期刊at-Automatisierungstechnik最佳论文奖,2011和2013年两次获德国VDI机械电子学研讨会最佳论文奖。他担任过很多国际学术会议的主席,并将任2020年IFAC世界大会协调主席,2005年至今担任德国机械电子学大会程序委员会共同主席。曾任2010年IFAC第5届机电系统国际会议的国际程序委员会(IPC)副主编,2006年IFAC第4届机电系统国际会议IPC主席,2004年德国GMA机电系统设计研讨会程序委员会主席,2001年Boppard控制工程学术研讨会程序委员会主席。
合作教师:杨灿军教授,ycj@zju.edu.cn朱笑丛副教授,zhuxiaoc@zju.edu.cn
课程考核方式:作业(40%~60%)+线下闭卷考试(60%~40%)
课程内容安排
Unit 90 min | Topic | Homework | |
1 | Introduction | MRC_Intro | Home preparation, see below |
2 | Kinematics | MRC_L1 | |
3 | Localization 1 | MRC_L2 | |
4 | Revisiting State Space | MRC_L3 | |
5 | Kalman Filtering 1 | MRC_L4 | |
6 | Kalman Filtering 2 | MRC_L4 | |
7 | Localization 2 | MRC_L5 | |
8 | Mapping | MRC_L6 | |
9 | Observability and SLAM | MRC_L7 | |
10 | Controllability and Flatness | MRC_L8 | |
11 | Guidance | MRC_L9 | |
12 | Tracking Control | MRC_L10 | |
13 | Ex-0:Mobile Robot Simulation Framework | MRC_Ex0 | |
14 | Ex-1: Kinematics Exercise | MRC_Ex1 | HW-1 |
15 | Ex-2: Kalman Filter | MRC_Ex2 | HW-2 |
16 | Ex-3: Localization Exercise 2 (EKF) – Solution, Theory | MRC_Ex3_1 | |
17 | Ex-3: Localization Exercise 2 (EKF) – Simulation Presentation | MRC_Ex3_2 | HW-3 |
18 | Oral/Written Exam |
Schedule 2025
Day | Date | Time (Beijing) | Unit |
1 | Wed Sep 17 | 18:50-20:25 | Introduction |
2 | Thu Sep 18 | 18:50-20:25 | L1 + Ex0 |
3 | Fri Sep 19 | 18:50-20:25 | L2 |
4 | MonSep 22 | 18:50-20:25 | L3 |
5 | Wed Sep 24 | 18:50-20:25 | Ex1 / HW-1 submission + discussion |
6 | ThuSep 25 | 18:50-20:25 | L4 part-1 |
7 | Fri Sep 26 | 18:50-20:25 | L4 part-2 |
8 | Mon Sep 29 | 18:50-20:25 | L5 |
9 | Tue Sep 30 | 18:50-20:25 | L6 |
10 | Thu Oct 9 | 18:50-20:25 | Ex2 / HW-2 submission + discussion |
11 | Fri Oct 10 | 18:50-20:25 | Ex3_1 |
12 | Mon Oct 13 | 18:50-20:25 | L7 |
13 | Tue Oct 14 | 18:50-21:55** | L8 + L9 ** |
14 | Wed Oct 15 | 18:50-20:25 | L10 |
15 | Fri Oct 17 | 18:50-20:25 | Ex3_2 / HW-3 submission + discussion |
16 | To be defined | To be defined | Exam |
Legend: BLACK … lectures, BLUE … exercises, GREEN … examination
请同学根据以上课程时间信息,自行安排选课计划,可相互转告通知,谢谢!
机械工程学院
2025年6月3日