“中石协·石化机械杯”第十届中国研究生能源装备创新设计大赛全国总决赛已于2023年9月15日至17日在中国石油大学(华东)圆满结束,浙大学子在决赛表现突出,斩获全国一等奖1项,二等奖1项,三等奖5项,一等奖项目同时获得“能源装备之星”荣誉称号。能源装备创新设计大赛以提升研究生创新实践能力为核心,以国家战略需求为导向,按照“竞赛培养人才、人才引领创新、创新驱动发展”的理念,围绕能源装备的技术创新,打造研究生创新交流实践平台,打造政产学研用合作创新平台。本届大赛有221个研究生培养单位1556个参赛团队成功提交作品,经专家委员会现场评审讨论,确定入围决赛项目370支。
参赛作品经展板(实物)展示及现场答辩评审及“能源装备之星”交流展示等环节,最终“深海仿生软体机器人”团队获得全国一等奖;“基于多级相变储热的高寒地区太阳能与热泵联合供热系统”团队获得全国二等奖;“鱼雷型八推进器高机动性水下机器人”团队、“深蓝之眼--甲烷渗漏区移动式多功能探测平台”团队、“面向导管架运维的浮游-爬行复合式ROV系统”团队、“面向深海潜器接驳的位姿容错型无线充电装置”团队、“基于新能源材料的废水处理设备”团队获得全国三等奖。
一等奖项目介绍
深海仿生软体机器人
团队成员:干乐天、阮东瑞、王海俊、陈祥平、薛耀庭
指导老师:李铁风、周方浩
作品简介:
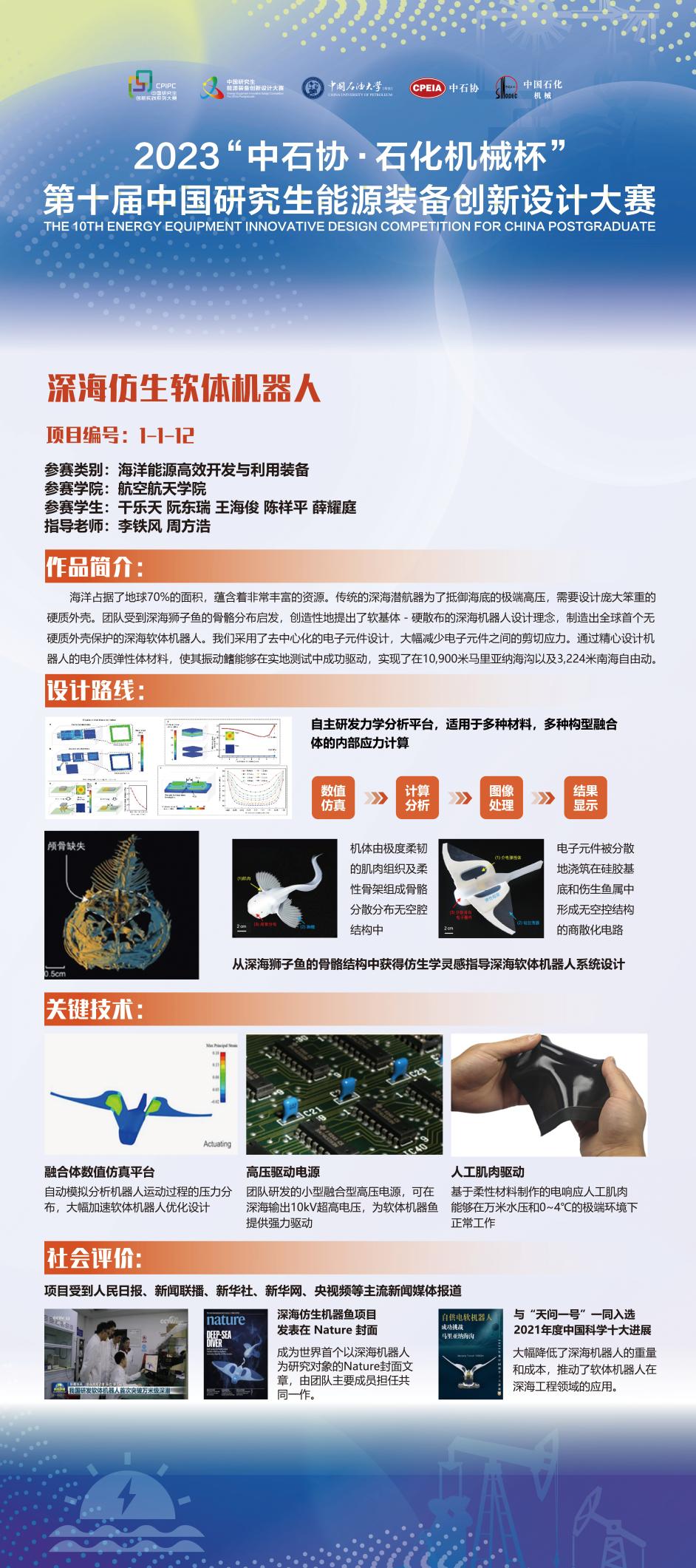
海洋占据了地球70%的面积,蕴含着非常丰富的资源。传统的深海潜航器为了抵御海底的极端高压,不得不设计庞大笨重的硬质外壳。团队通过模仿深海狮子鱼的骨骼分布,创造性地提出了软基体-硬散布的深海机器人设计理念,制造出全球首个无硬质外壳保护的深海软体机器人。该软体机器人成功打卡全球海洋最深处—马里亚纳海沟。以该软体机器鱼为基础,团队针对各类海洋探索任务,设计制造搭载不同设备的软体机械鱼,提供更多融合型力学解决方案。
深海仿生软体机器人
二等奖项目介绍
基于多级相变储热的高寒地区太阳能与热泵联合供热系统
团队成员:高近爽、李胜、仵凡
作品简介:
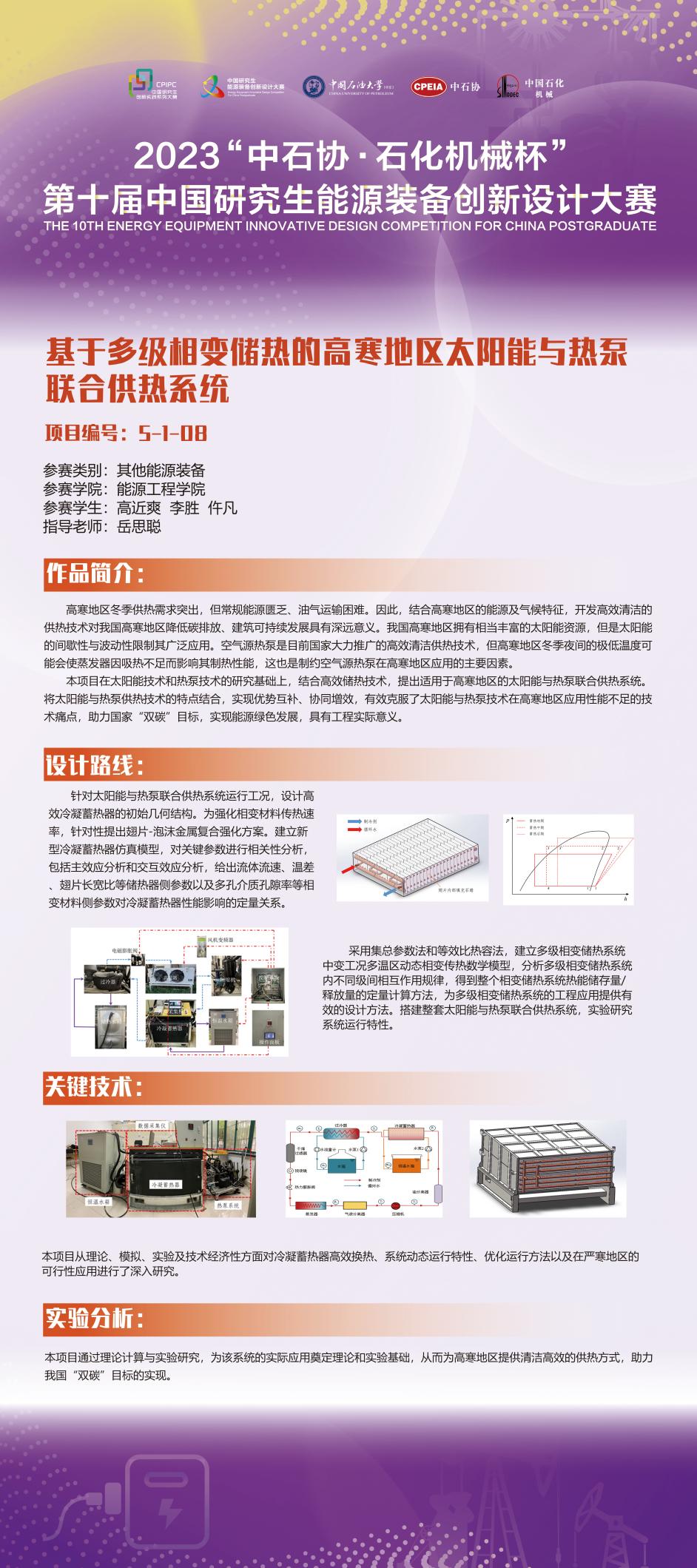
针对高寒地区气候特征,设计了一种新型太阳能与热泵联合供热系统,通过冷凝蓄热器分别对系统产生的热量进行存储与释放,提高供能稳定性以及能源综合利用效率,为太阳能与热泵联合供热系统在高寒地区的实际应用奠定理论和实验基础。
基于多级相变储热的高寒地区太阳能与热泵联合供热系统
三等奖项目介绍(部分)
面向导管架运维的浮游-爬行复合式ROV系统
团队成员:李琪琪、张钰炯、郝亮亮、陈浩、傅辰
指导老师:金浩然、杨克己
作品简介:
在“海洋强国”战略背景下,我国海洋油气资源开发领域发展势头迅猛,海洋工程结构物中的海洋平台导管架结构作为离岸作业的平台基础,逐渐成为开发和利用海洋油气资源的重要设施。海洋平台导管架的体积庞大、结构复杂、造价昂贵,且作业所处工作环境十分恶劣,容易产生各种缺陷导致结构失效引发安全事故,因此对其进行长期运维十分必要。
目前,海洋油气平台导管架主要依靠人工实施运维,难以长时间、高效率地执行任务且人身安全无法得到保障。带缆遥控水下机器人(ROV)不受潜水时间限制,更加稳定高效。然而受复杂多变的水况影响,传统浮游型式ROV通常无法稳定在运维区域,极大影响运维作业的效率和效果。针对以上问题,提出面向海洋油气开采平台导管架运维的浮游-爬行复合式ROV系统设计方案,以半模块化结构设计、ROV复合运动控制技术以及基于水下视觉的辅助作业与检测技术为抓手,完成系统装配制造与软硬件集成,研发一套水下机器人运维系统,并进行相关实验研究。

面向导管架运维的浮游-爬行复合式ROV系统
面向深海潜器接驳的位姿容错型无线充电装置
团队成员:巩硕
指导老师:李德骏、林鸣威
作品简介:
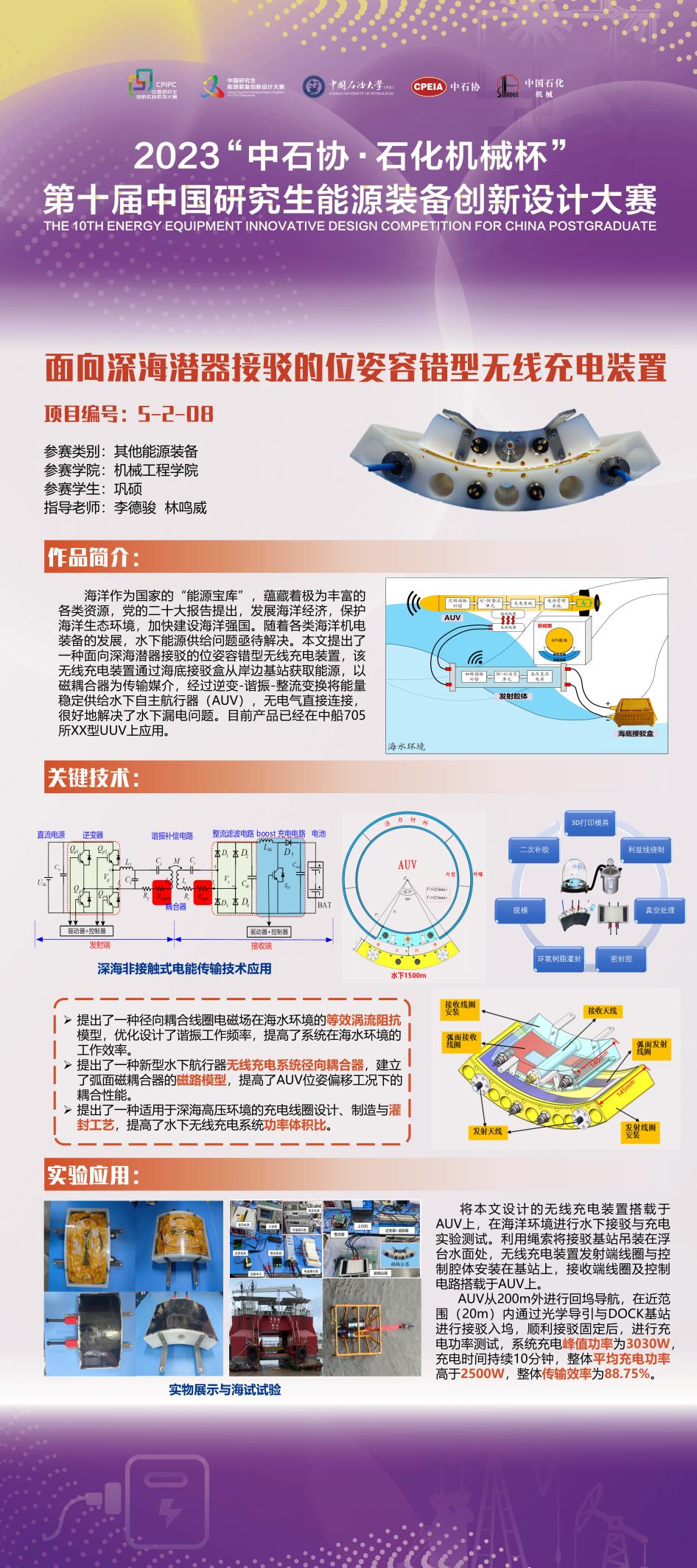
海洋作为国家的“能源宝库”,蕴藏着极为丰富的各类资源,党的二十大报告提出,发展海洋经济,保护海洋生态环境,加快建设海洋强国。随着各类海洋机电装备的发展,水下能源供给问题亟待解决。本项目提出了一种面向深海潜器接驳的位姿容错型无线充电装置,该无线充电装置通过海底接驳盒从岸边基站获取能源,以磁耦合器为传输媒介,经过逆变-谐振-整流变换将能量稳定供给自主水下航行器(AUV),无电气直接连接,很好地解决了水下漏电问题。
面向深海潜器接驳的位姿容错型无线充电装置