8月18至20日,第五届中国研究生机器人创新设计大赛决赛在湖南大学举行。浙江大学团队斩获全国二等奖5项,全国三等奖4项,浙江大学获得“优秀组织单位”荣誉称号。
中国研究生机器人创新设计大赛参赛作品范围涉及机器人的新概念、新技术、新产品,重点考核研究生对市场需求洞察、创新性设计和关键技术实现等能力。本次大赛共有来自234家培养单位的1177支队伍参加,共提交1129件作品,其中浙江大学共有11支队伍进入决赛。
经过现场展示和评审答辩,最终“适用于巡检机器人的侧卧式剪式伸缩机构”团队、“深海水体资源监测及获取机器人”团队、“WEI-WIN 偏瘫康复机器人”团队、“深海常驻留移动探测作业平台”团队、“基于静液力支撑的关节型腿足式机器人”团队获得全国二等奖;“驱动-计算-传感一体化智能软模块”团队、“军警用轻量自主高速微型四旋翼集群”团队、“基于光学交互技术的小型水下机器人”团队、“鱼雷型八推进器高机动性水下机器人”团队获得全国三等奖。
中国研究生机器人创新设计大赛是“中国研究生创新实践系列大赛”之一,也是目前国内层次最高、规模最大、影响最广泛的全国性研究生学科竞赛之一,旨在引导广大高校学生积极投身“大众创业,万众创新”的时代潮流,提升研究生创新创业意识,培养研究生设计能力,推动机器人科技创新发展,使机器人科技及其产品更好地推动经济发展和造福人民。
二等奖项目介绍(部分)
适用于巡检机器人的侧卧式剪式伸缩机构
团队成员:肖璇、陈霖、王云江、胡鑫奔
指导老师:杨克己、金浩然
作品简介:
巡检机器人面对许多空间窄、巡检点位分布高差大的巡检环境,要求其搭载云台的部件有足够的垂向独立行程。由于体积、重量、负载、布线等多重因素的影响,现有的伸缩机构难以满足要求。本团队结合了剪式结构的高提升比联动特性和箱式结构的高稳定性特点,提出了一种面向空间窄、巡检点位分布高差高环境的侧卧式剪式伸缩机构。该机构利用侧卧式剪式结构提供超大提升比;组装双列导轨同剪式结构一起构成框型,以弥补其在稳定性上的不足。该机构利用剪式结构自身的折叠特性进行线缆的收纳;并采用尼龙复合碳纤维板进行加工装配,在实现低质量的前提下保证了结构刚度。
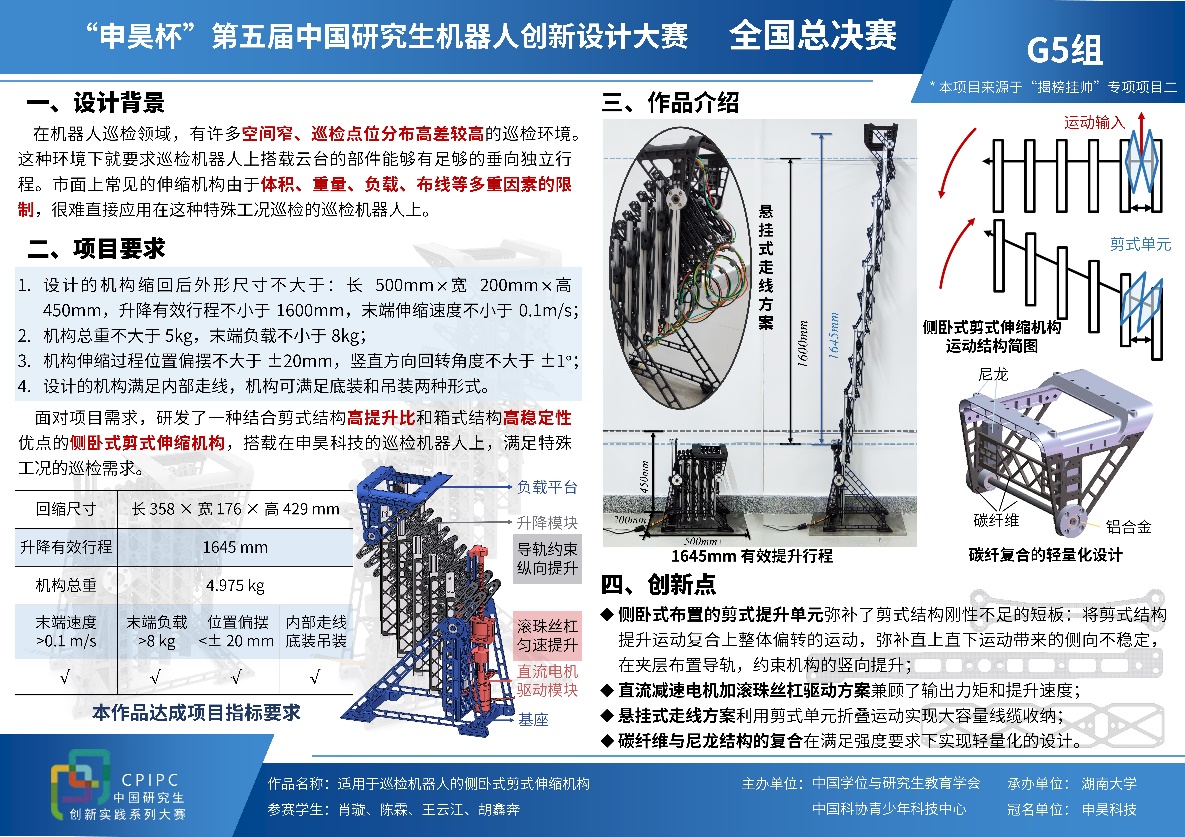
图一. 适用于巡检机器人的侧卧式剪式伸缩机构
深海水体资源监测及获取机器人
团队成员:王荧、林型双、黄聪驰
指导老师:陈家旺
作品简介:
目前,在深海环境监测装备领域现有的技术手段存在着无法长期原位监测及样本采集、样本数量少且样本种类单一。针对上述不足,本项目旨在设计一种环境感知、长期原位监测以及高时空序列样本获取三位一体的深海冷泉区海水资源监测及获取系统,以填补深海水体资源环境长期监测及获取的设备与技术空白。形成一套针对深海复杂环境下海水资源监测及获取系统,实现通过环境感知获取、预测特殊时空点位的样本并对数据分析处理,从而建立一套深海近底水体资源监测、获取、评估体系。最终应用于深海甲烷渗漏区、二氧化碳封存区等特殊海底环境,构建长期、立体化的深海冷泉区海水资源监测及获取系统,为我国包括天然气水合物蕴藏区在内的海底环境资源开发提供技术支撑。
