On June 28, 2020, the "Qizhen Cup" Zhejiang University's top ten new academic achievements for 2020 students was held online. The team of School of Mechanical Engineering achieved good results and won 2 awards and 1 new achievement nomination award of the 2020 "Qizhen Cup" Zhejiang University's top ten new academic achievements for students.
The "Qizhen Cup" selection activity for the top ten new academic achievements of Zhejiang University students aims to fully mobilize the enthusiasm of our students in academic research and create a strong academic atmosphere on campus. Since the start of the "Qizhen Cup" Zhejiang University's top ten new academic achievements for students in 2020, after preliminary publicity, student application, and department recommendation, a total of 82 achievements from 33 faculties and departments have been selected for the "Qizhen Cup". In the end, 20 projects entered the final defense meeting.

In the final defense, the mechanical team performed well. After online voting and public defense, Dr. Jiao Zhongdong’s "Origami-Inspired'Building Blocks' Software Robot", and Dr. Fei Panyu and Dr. Zhang Tongtong from the medical school jointly declared "Cracking Immune Cells to Identify Cancer" Cell Code" won the "Qizhen Cup" Zhejiang University's Top Ten Academic New Achievement Award for 2020 Students, and Master Zhou Luyu's "3D Printing Flexible Electronic Device" won the New Achievement Nomination Award.
Introduction to awarded projects
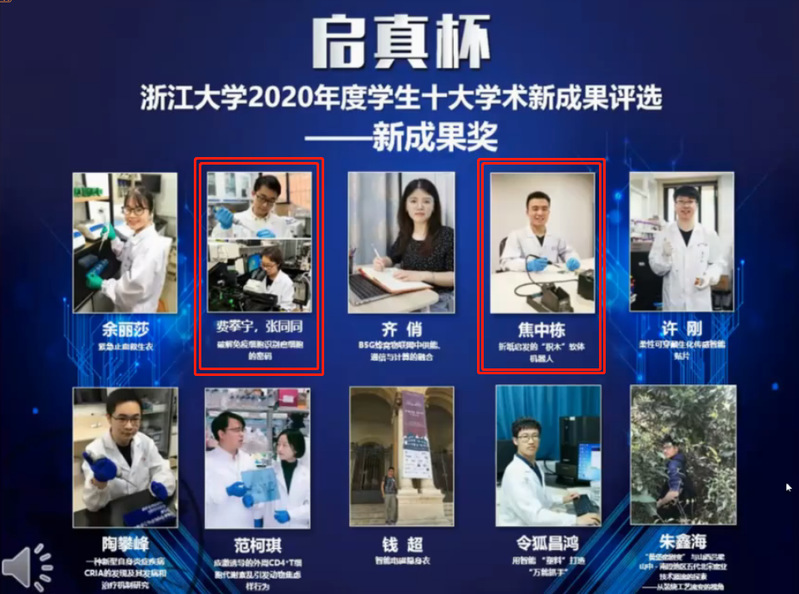
New Achievement Award-"Building Block" software robot inspired by origami
Responsible person: Dr. Jiao Zhongdong
Instructor: Prof. Zou Jun/Prof. Yang Huayong
Achievement Brief: The design of the project is inspired by the ancient art of origami. A fluid-driven fully flexible artificial muscle is designed by imitating the folding movement of origami. The artificial muscle module can drive a weight up to 9kg, which is equivalent to more than 473 times its own weight. A single muscle module can simultaneously achieve a composite motion of expansion and twisting or a composite motion of bending and torsion. The combination of multiple modules can decouple the composite motion to achieve expansion, bending, torsion, and radial motion. These basic "building blocks can be combined Assembled into a variety of reconfigurable software robots, when faced with dynamic and complex tasks such as space exploration and emergency rescue, they can be restructured according to different environmental changes, adapt to different operating environments, and meet dynamic and complex scenarios. Mission requirements.
New Achievement Award-Cracking the code for immune cells to recognize cancer cells
Responsible person: Dr. Fei Panyu/Dr. Zhang Tongtong
Instructor: Professor Chen Zichen/Professor Chen Wei
Achievement introduction: When normal cells in our body are infected by bacteria or genetically mutated to become cancer cells, our immune system will start work to eliminate these cells accurately and quickly to protect the health of the body. In this process, "precision and speed" are very important, because the rapid search for a very small number of diseased cells in the numerous cells of the human body (about 50 trillion) requires our immune system to have a set of efficient identification codes. This result combines molecular dynamics simulation technology, single-molecule mechanics detection technology, molecular biology and immunology and other biophysical and chemical methods to induce conformational changes in stimulating pMHC-I, increasing its binding strength with TCR, and prolonging its relationship with TCR. The binding time of pMHC-1 magnifies the difference between different pMHC-1 and helps CD8+ T cells to accurately and quickly identify diseased cells.
New Achievement Nomination Award-3D Printing Flexible Electronic Equipment
Responsible person: Master Zhou Luyu
Instructor: Professor Yong He
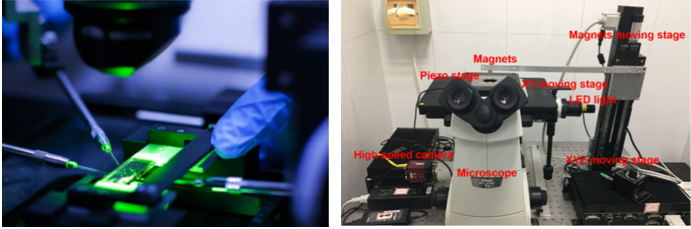
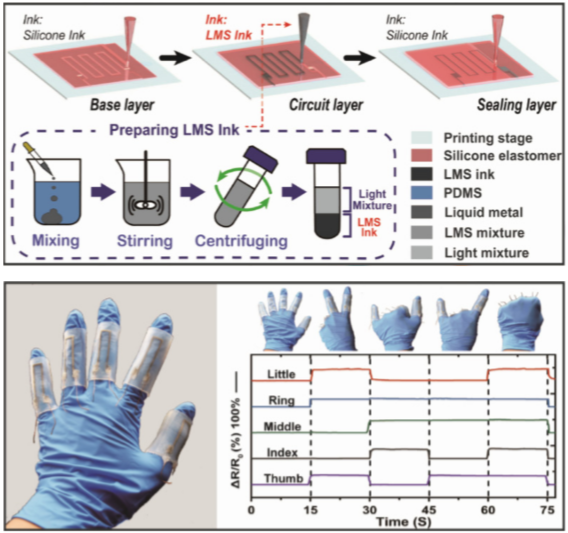
Achievement introduction: The intrinsic flexibility and high conductivity of liquid metal have great application prospects in flexible electronics. However, the spheroidizing effect brought by the high surface tension of liquid metal during manufacturing severely restricts its application scenarios. This achievement puts forward a new idea of liquid metal/flexible material symbiosis printing. Through the high-viscosity silica gel of the outer nozzle and the liquid metal of the inner nozzle, the balling effect during the extrusion of the liquid metal is suppressed and the bottleneck of liquid metal 3D printing is successfully broken through. At the same time, a new type of liquid metal ink was developed to address the problem of easy leakage of liquid metal. Aiming at the slow curing speed of high-elastic silicone materials and the inability to 3D print the bottleneck, by revealing the weak interaction mechanism between nano-silica particles and silica gel molecular chains, a universal multi-material 3D printing method of silica gel is proposed; based on the above basic research, the first manufacturing can Pressure-activated fully printed flexible circuits and multi-dimensional flexible sensors that measure stretch, bend, and swell, as well as endoscope pose detection, have been successfully used in data gloves.


